Yuhan Wang
Yuhan Wang
Home
Publications
Experience
Honors
Services
Teaching
Blog
Skills
Contact
Light
Dark
Automatic
2
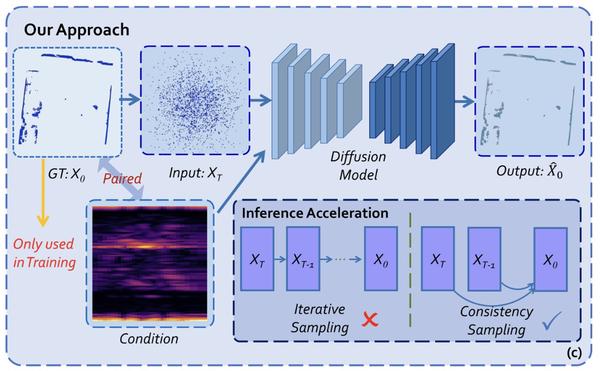
Towards Dense and Accurate Radar Perception Via Efficient Cross-Modal Diffusion Model
Ruibin Zhang
,
Donglai Xue
,
Yuhan Wang
,
Ruixu Geng
,
Fei Gao
In
IEEE Robotics and Automation Letters. (RA-L)
PDF
Cite
Code
Video
Project Page
Cite
×